首页
关于
Search
1
同步本地Markdown至Typecho站点
146 阅读
2
微服务
47 阅读
3
苍穹外卖
43 阅读
4
动态图神经网络
40 阅读
5
JavaWeb——后端
36 阅读
后端学习
项目
杂项
科研
论文
默认分类
登录
找到
14
篇与
科研
相关的结果
2026-01-20
OMNet仿真
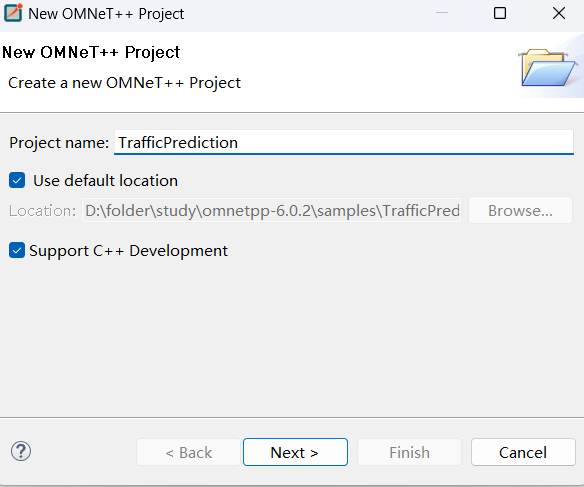
OMNeT仿真 初始安装配置 🧩 第 0 步:下载和安装 OMNeT++ 选择版本: 👉 OMNeT++ 6.0.1 或 6.0.2(官方 Windows 兼容) 下载地址(官网): https://omnetpp.org/download/ 安装步骤概述: 下载 ZIP → 解压 打开 mingwenv.cmd(这个是必须的环境) 在弹出的终端执行: ./configure make 然后运行 omnetpp 就会启动图形化 IDE(Eclipse)。 这个过程大概 10–20 分钟。 第 1 步:下载 INET 框架 推荐与你的 OMNeT++ 版本兼容: OMNeT++ 6.x → 用 INET 4.5.x 下载 INET: https://github.com/inet-framework/inet/releases 解压后你会看到 INET 根目录。 在同样的 mingwenv 环境中运行: cd inet source setenv make makefiles make -j4 等待几分钟。 导入 INET 到 OMNeT++ IDE 在 OMNeT++ IDE 中: File → Import → 选择General文件夹 → Existing Projects into Workspace 选择 INET 根目录 → Finish 你的工程列表里会看到 INET。 网络仿真 第 0 步:打开IDE 进入你的 OMNeT++ 安装目录,双击 omnetpp.exe 第 1 步:创建你的项目 在 IDE 里: File → New → OMNeT++ Project → Empty Project 项目名:TrafficPrediction Finish 设置 TrafficPrediction 依赖 INET(非常关键) 现在手动设置 INET 依赖: 右键 TrafficPrediction 点击 Properties 左侧选 Project References 在右边勾选 inet 第 2 步:创建文件夹、文件 项目结构如下: UdpDemo/ │ ├── simulations/ │ ├── SimpleUdpNetwork.ned ← 网络拓扑(重点) │ ├── omnetpp.ini ← 仿真配置(重点) │ └── package.ned ← 自动生成(可以忽略) │ ├── src/ ← 本 demo 不需要写 C++,这个空着 │ └── Makefile ← OMNeT++ 自动管理 SimpleUdpNetwork.ned // // This program is free software: you can redistribute it and/or modify // it under the terms of the GNU Lesser General Public License as published by // the Free Software Foundation, either version 3 of the License, or // (at your option) any later version. // // This program is distributed in the hope that it will be useful, // but WITHOUT ANY WARRANTY; without even the implied warranty of // MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the // GNU Lesser General Public License for more details. // // You should have received a copy of the GNU Lesser General Public License // along with this program. If not, see http://www.gnu.org/licenses/. // package udpdemo.simulations; import inet.networklayer.configurator.ipv4.Ipv4NetworkConfigurator; import inet.node.inet.StandardHost; import inet.node.inet.Router; network SimpleUdpNetwork { submodules: configurator: Ipv4NetworkConfigurator { } hostA: StandardHost { @display("p=100,200"); } router: Router { @display("p=300,200"); } hostB: StandardHost { @display("p=500,200"); } connections allowunconnected: hostA.pppg++ <--> { delay = 1ms; datarate = 100Mbps; } <--> router.pppg++; router.pppg++ <--> { delay = 1ms; datarate = 100Mbps; } <--> hostB.pppg++; } omnetpp.ini [General] network = udpdemo.simulations.SimpleUdpNetwork sim-time-limit = 30s # 自动 ARP,减少日志噪声 **.arp.typename = "GlobalArp" # HostA 配置一个 UDP 发送应用 *.hostA.numApps = 1 *.hostA.app[0].typename = "UdpBasicApp" *.hostA.app[0].destAddresses = "hostB" *.hostA.app[0].destPort = 5000 *.hostA.app[0].messageLength = 1000B *.hostA.app[0].sendInterval = 1s *.hostA.app[0].startTime = 1s # HostB 配置一个 UDP 接收器 *.hostB.numApps = 1 *.hostB.app[0].typename = "UdpSink" *.hostB.app[0].localPort = 5000 第 3 步:编译项目 菜单: Project → Build All 第 4 步:运行仿真 右键 omnetpp.ini: Run As → OMNeT++ Simulation 运行后你会看到: hostA 每秒发出一个 UDP 包 hostB 收到包 router 转发 可以点击连接查看流量、抓包 可以打开 Result 分析包数吞吐量 命令行模式 第一步:修改 omnetpp.ini Cmdenv 如果不加限制,会在屏幕上疯狂打印每一条日志,这比图形界面还慢。请确保你的 [General] 部分包含以下设置: [General] # ... (你的其他配置) ... # ============================================================ # Cmdenv 性能优化配置 # ============================================================ cmdenv-express-mode = true # 开启极速模式 cmdenv-performance-display = false # 关闭性能数据显示 (CPU/内存占用等),进一步减少I/O cmdenv-status-frequency = 10s # 每10秒才在屏幕上打印一次进度,防止刷屏 **.cmdenv-log-level = off # 彻底关闭模块的文本日志输出 (最关键的一行) # 确保不记录 eventlog (体积巨大且拖慢速度) record-eventlog = false 第二步:选择运行方式 1)在顶部菜单栏,点击 Run -> Run Configurations...。 2)在左侧栏找到 OMNeT++ Simulation,展开它,点击你的运行配置(通常叫 TrafficPrediction 或者 omnetpp.ini)。 3)在右侧面板中,点击 User Interface 选项卡(或者叫 Qt/CmdEnv tab)。 4)找到 User Interface 下拉菜单,将 Qtenv (图形界面) 改为 Cmdenv (命令行)。 5)点击右下角的 apply->Run。
科研
zy123
1月20日
0
4
0
2025-08-31
训练神经网络
🧠 神经网络训练流程基础笔记 1. 数据集(Dataset) 数据集包含了 样本 (sample) 和 标签 (label) 在你的场景里: 样本 = 一个时间步的图(节点特征矩阵 + 邻接矩阵) 标签 = 每个节点是否掉线(0/1) 2. Batch(批量) Batch = 一次训练用到的一小部分样本 batch_size 表示 每次梯度更新时用多少个样本 例如: 数据集有 1000 个样本 batch_size=8 → 每次训练只拿 8 个样本来算梯度 这样能减少显存占用,也让模型更新更频繁 3. Epoch(轮次) Epoch = 把整个数据集完整训练一遍 如果: 数据集有 1000 个样本 batch_size=8 那么 1 个 epoch 需要 1000 / 8 = 125 次迭代,才能用完所有样本 训练 20 个 epoch,就相当于把数据重复“看”了 20 遍 4. 训练循环流程 一次完整训练过程一般是这样: 初始化模型参数(随机权重) 重复若干 epoch 打乱训练数据 按 batch_size 切成小批次 对每个 batch: 前向传播 (forward) 把输入样本丢进模型 得到预测结果 计算损失 (loss) 预测 vs 真实标签 的差距 反向传播 (backward) 自动求导,算出梯度 参数更新 (step) 用优化器(SGD/Adam)更新参数,让模型预测更接近标签 最终得到训练好的模型 5. 为什么要用 batch? 全量训练 (batch_size=1000) 优点:精确 缺点:显存占用大,更新慢 小批量训练 (batch_size=8~32) 优点:节省显存,更新更频繁,收敛快 缺点:梯度有点“噪声”(但通常能帮助模型泛化) 👉 所以主流方法是 小批量训练 + 多个 epoch。 6. 直观理解 把训练比作 学生背单词: 样本 = 单词 batch_size = 一次背多少个单词(8 个单词一组,还是 50 个单词一组) epoch = 把词表完整过一遍(1000 个单词都背一遍) 多个 epoch = 重复背很多遍(记得更牢) 7. 在你现在的任务中 数据:1000 时间步 batch_size=8 → 一次训练 8 个时间步的图 epochs=20 → 每个时间步都要用到,整个过程重复 20 遍 总共更新参数的次数 = 1000/8 * 20 = 2500 次 📌 一句话总结: 训练神经网络 = 前向传播(算预测) + 损失函数(算误差) + 反向传播(算梯度) + 参数更新(优化器) 重复这个过程,按 batch 分批喂数据,按 epoch 控制重复多少轮。
科研
zy123
1年前
0
10
0
2025-07-05
matlab
matlab笔记 命令行窗口 clc:清屏(命令行窗口) clear all:把命名的变量删掉,不是命令行窗口 命名规则: 变量命名以字母开头,不可以下划线,变量是区分字母大小写的 脚本 %% xxx 注释(百分号+一个空格) % xxx 也是注释 s='a' '"aaaa",字符串 abs(s) 字符s的ascii码,为97 char(97), 输出'a' numtostr(65) ans='65',数字转字符串 length(str),字符串的长度 矩阵 A=[1 2 3 ;4 5 6 ;7 8 9] 分号换行 B=A‘ ,矩阵转置 C=A(:) ,将矩阵拉成一列,按列存储,第一列拼接第二列拼接第三列 D=inv(A) 求逆矩阵 E=zeros(10,5,3) 生成10行5列3维0矩阵 元胞数组 A=cell(1,6),生成1行6列的小格子,每个小格子可以存放各种数据 eye(3),生成3x3的单位阵 A{2}=eye(3),matlab数组从1开始,不是0
科研
zy123
1年前
0
10
0
2025-05-10
ZY网络重构分析
多智能体随机网络的全局知识对其模型收敛性影响的研究 智能体网络的现状、包括网络结构(和现有互联网、物联网的差异)、通信协议(A2A(agent)、MCP成为主流,为了智能体之间的通信)传统的协议已经慢慢被替代,不止是传统互联网应用-》大模型 多智能体随机网络与传统互联网不一样,结构基于随机网络(有什么作用,举一些具体的例子),通信协议(没有专门的协议,我们工作的出发点)、应用(联邦学习、图神经网络、强化学习) 网络模型的收敛性,怎么定义收敛性?收敛速度、收敛效率(考虑代价)、收敛的稳定性(换了个环境变化大),联邦学习、强化学习收敛性的问题,和哪些因素有关,网络全局结构对它的影响;推理阶段也有收敛性,多智能体推理结果是否一致;图神经网络推理结果是否一致。 多智能体随机网络全局知识的获取(分布式、集中式) 多智能体随机机会网络、动态谱参数估算、网络重构算法、聚类量化算法、联邦学习、图神经网络 如何确定kmeans的簇数?节点之间的流量,空间转为时间的图。 压缩感知 函数拟合 采样定理 傅里叶变换 谱分解与网络重构 实对称矩阵性质: 对于任意 $n \times n$ 的实对称矩阵 $A$: 秩可以小于 $n$(即存在零特征值,矩阵不可逆)。 但仍然有 $n$ 个线性无关的特征向量(即可对角化)。 特征值有正有负!!! 一个实对称矩阵可以通过其特征值和特征向量进行分解。对于一个 $n \times n$ 的对称矩阵 $A$, 完整谱分解可以表示为: $$ A = Q \Lambda Q^T \\ A = \sum_{i=1}^{n} \lambda_i x_i x_i^T $$ $Q$是$n \times n$的正交矩阵,每一列是一个特征向量;$\Lambda$是$n \times n$的对角矩阵,对角线元素是特征值$\lambda_i$ ,其余为0。 其中,$\lambda_i$ 是矩阵 $A$ 的第 $i$ 个特征值,$x_i$ 是对应的特征向量。(注意!这里的特征向量需要归一化!!!) 如果矩阵 $A$ 的秩为 $r$ ,那么谱分解里恰好有 $r$ 个非零特征值。 用这 $r$ 对特征值/特征向量就能精确重构出 $A$,因为零特征值对矩阵重构不提供任何贡献。 因此,需要先对所有特征值取绝对值,从大到小排序,取前 $r$ 个!!! 截断的谱分解(取前 $\kappa$ 个特征值和特征向量) 如果我们只保留前 $\kappa$ 个绝对值最大的特征值和对应的特征向量,那么: 特征向量矩阵 $U_\kappa$:取 $U$ 的前 $\kappa$ 列,维度为 $n \times \kappa$。 特征值矩阵 $\Lambda_\kappa$:取 $\Lambda$ 的前 $\kappa \times \kappa$ 子矩阵(即前 $\kappa$ 个对角线元素),维度为 $\kappa \times \kappa$。 因此,截断后的近似分解为: $$ A \approx U_\kappa \Lambda_\kappa U_\kappa^T\\ A \approx \sum_{i=1}^{\kappa} \lambda_i x_i x_i^T $$ 推导过程 特征值和特征向量的定义 对于一个对称矩阵 $A$,其特征值和特征向量满足: $$ A x_i = \lambda_i x_i $$ 其中,$\lambda_i$ 是特征值,$x_i$ 是对应的特征向量。 谱分解 将这些特征向量组成一个正交矩阵 $Q$ $A = Q \Lambda Q^T$ $$ Q = \begin{bmatrix} x_1 & x_2 & \cdots & x_n \end{bmatrix}, $$ $$ Q \Lambda = \begin{bmatrix} \lambda_1 x_1 & \lambda_2 x_2 & \cdots & \lambda_n x_n \end{bmatrix}. $$ $$ Q \Lambda Q^T = \begin{bmatrix} \lambda_1 x_1 & \lambda_2 x_2 & \cdots & \lambda_n x_n \end{bmatrix} \begin{bmatrix} x_1^T \\ x_2^T \\ \vdots \\ x_n^T \end{bmatrix}. $$ $$ Q \Lambda Q^T = \lambda_1 x_1 x_1^T + \lambda_2 x_2 x_2^T + \cdots + \lambda_n x_n x_n^T. $$ 可以写为 $$ A = \sum_{i=1}^{n} \lambda_i x_i x_i^T. $$ 网络重构 在随机网络中,网络的邻接矩阵 $A$ 通常是对称的。利用预测算法得到的谱参数 ${\lambda_i, x_i}$ 后,就可以用以下公式重构网络矩阵: $$ A(G) = \sum_{i=1}^{n} \lambda_i x_i x_i^T $$ 性质 特征分解/谱分解 奇异值分解(SVD) 适用矩阵 仅限方阵($n \times n$) 任意矩阵($m \times n$,包括矩形矩阵) 分解形式 $A = P \Lambda P^{-1}$ $A = U \Sigma V^*$ 矩阵类型 可对角化矩阵(如对称、正规矩阵) 所有矩阵(包括不可对角化的方阵和非方阵) 输出性质 特征值($\lambda_i$)可能是复数 奇异值($\sigma_i$)始终为非负实数 正交性 仅当 $A$ 正规时 $P$ 是酉矩阵 $U$ 和 $V$ 始终是酉矩阵(正交) 谱分解的对象为实对称矩阵 奇异值分解 步骤 步骤 1:验证矩阵对称性 确保 $A$ 是实对称矩阵(即 $A = A^\top$),此时SVD可通过特征分解直接构造。 步骤 2:计算特征分解 对 $A$ 进行特征分解: $$ A = Q \Lambda Q^\top $$ 其中: $Q$ 是正交矩阵($Q^\top Q = I$),列向量为 $A$ 的特征向量。 $\Lambda = \text{diag}(\lambda_1, \lambda_2, \dots, \lambda_n)$,$\lambda_i$ 为 $A$ 的特征值(可能有正、负或零)。 步骤 3:构造奇异值矩阵 $\Sigma$ 奇异值:取特征值的绝对值 $\sigma_i = |\lambda_i|$,得到对角矩阵: $$ \Sigma = \text{diag}(\sigma_1, \sigma_2, \dots, \sigma_n) $$ 排列顺序:通常按 $\sigma_i$ 降序排列(可选,但推荐)。 步骤 4:处理符号(负特征值) 符号矩阵 $S$:定义对角矩阵 $S = \text{diag}(s_1, s_2, \dots, s_n)$,其中: $$ s_i = \begin{cases} 1 & \text{if } \lambda_i \geq 0, \ -1 & \text{if } \lambda_i < 0. \end{cases} $$ 左奇异向量矩阵 $U$:调整特征向量的方向: $$ U = Q S $$ 即 $U$ 的列为 $Q$ 的列乘以对应特征值的符号。 步骤 5:确定右奇异向量矩阵 $V$ 由于 $A$ 对称,右奇异向量矩阵 $V$ 直接取特征向量矩阵: $$ V = Q $$ 步骤 6:组合得到SVD 最终SVD形式为: $$ A = U \Sigma V^\top $$ 验证: $$ U \Sigma V^\top = (Q S) \Sigma Q^\top = Q (S \Sigma) Q^\top = Q \Lambda Q^\top = A $$ (因为 $S \Sigma = \Lambda$,例如 $\text{diag}(-1) \cdot \text{diag}(2) = \text{diag}(-2)$)。 例子(含正、负、零特征值) 设对称矩阵 $$ A = \begin{bmatrix} 1 & 0 & 1 \\ 0 & 0 & 0 \\ 1 & 0 & -1 \end{bmatrix} $$ 特征分解 特征值: $$ \lambda_1 = \sqrt{2}, \quad \lambda_2 = -\sqrt{2}, \quad \lambda_3 = 0 $$ 特征向量矩阵和特征值矩阵: $$ Q = \begin{bmatrix} \frac{1 + \sqrt{2}}{2} & \frac{1 - \sqrt{2}}{2} & 0 \ 0 & 0 & 1 \ \frac{1}{2} & \frac{1}{2} & 0 \end{bmatrix}, \quad \Lambda = \begin{bmatrix} \sqrt{2} & 0 & 0 \ 0 & -\sqrt{2} & 0 \ 0 & 0 & 0 \end{bmatrix} $$ 构造SVD 步骤: 按 $|\lambda_i|$ 降序排列:$\sigma_1 = \sqrt{2}, \sigma_2 = \sqrt{2}, \sigma_3 = 0$(取绝对值后排序)。 奇异值矩阵: $$\Sigma = \mathrm{diag}\bigl(\sqrt{2},,\sqrt{2},,0\bigr).$$ 符号调整矩阵: $$ S = \mathrm{diag}\bigl(\operatorname{sign}(\lambda_1),,\operatorname{sign}(\lambda_2),,\operatorname{sign}(\lambda_3)\bigr) = \mathrm{diag}(+1,,-1,,+1), $$ 左奇异向量矩阵: $$ U = Q,S = \begin{bmatrix} \frac{1+\sqrt{2}}{2}\cdot1 & \frac{1-\sqrt{2}}{2}\cdot(-1) & 0\cdot1 \ 0\cdot1 & 0\cdot(-1) & 1\cdot1 \ \tfrac12\cdot1 & \tfrac12\cdot(-1) & 0\cdot1 \end{bmatrix} = \begin{bmatrix} \dfrac{1+\sqrt{2}}{2} & \dfrac{\sqrt{2}-1}{2} & 0 \ 0 & 0 & 1 \ \tfrac12 & -\tfrac12 & 0 \end{bmatrix}. $$ 右奇异向量矩阵: $$ V = Q. $$ 验证 $$ A = U,\Sigma,V^\top $$ 网络重构分析 基于扰动理论的特征向量估算方法 设原矩阵为 $A$,扰动后矩阵为 $A+\zeta C$(扰动矩阵 $\zeta C$,$\zeta$是小参数),令其第 $i$ 个特征值、特征向量分别为 $\lambda_i,x_i$ 和 $\tilde\lambda_i,\tilde x_i$。 特征向量的一阶扰动公式: $$ \Delta x_i =\tilde x_i - x_i \;\approx\; \zeta \sum_{k\neq i} \frac{x_k^T\,C\,x_i}{\lambda_i - \lambda_k}\;x_k, $$ 输出:对应第 $i$ 个特征向量修正量 $\Delta x_i$。 特征值的一阶扰动公式: $$ \Delta\lambda_i = \tilde\lambda_i - \lambda_i \;\approx\;\zeta\,x_i^T\,C\,x_i $$ **关键假设:**当扰动较小( $\zeta\ll1$) 且各模态近似正交均匀时,常作进一步近似 $$ x_k^T\,C\,x_i \;\approx\; x_i^T\,C\,x_i \; $$ 正交: $\{x_k\}$ 本身是正交基,这是任何对称矩阵特征向量天然具有的属性。 均匀:我们把 $C$ 看作“不偏向任何特定模态”的随机小扰动——换句话说,投影到任何两个方向 $(x_i,x_k)$ 上的耦合强度 $x_k^T,C,x_i\quad\text{和}\quad x_i^T,C,x_i$ 在数值量级上应当差不多,因此可以互相近似。 因此,将所有的 $x_k^T C x_i$ 替换为 $x_i^T C x_i$: $$ \Delta x_i \approx \zeta \sum_{k\neq i} \frac{x_i^T C x_i}{\lambda_i - \lambda_k} x_k = \zeta (x_i^T C x_i) \sum_{k\neq i} \frac{1}{\lambda_i - \lambda_k} x_k = \sum_{k\neq i} \frac{\Delta \lambda_i}{\lambda_i - \lambda_k} x_k \tag{*} $$ $$ \Delta x_i \approx\sum_{k\neq i} \frac{\Delta \lambda_i}{\lambda_i - \lambda_k} x_k \tag{*} $$ 问题: 当前时刻的邻接矩阵 $$ A^{(1)}\in\mathbb R^{n\times n},\qquad A^{(1)},x_i^{(1)}=\lambda_i^{(1)},x_i^{(1)},\quad |x_i^{(1)}|=1. $$ 下一时刻的邻接矩阵 $$ A^{(2)}\in\mathbb R^{n\times n}, $$ 已知它的第 $i$ 个特征值 $\lambda_i^{(2)}$(卡尔曼滤波得来). 求当前时刻的特征向量 $x_i^{(2)}$。 下一时刻第 $i$ 个特征向量的预测为 $$ \boxed{ x_i^{(2)} \;=\; x_i^{(1)}+\Delta x_i \;\approx\; x_i^{(1)} +\sum_{k\neq i} \frac{\lambda_i^{(2)}-\lambda_i^{(1)}} {\lambda_i^{(1)}-\lambda_k^{(1)}}\; x_k^{(1)}. } $$ 通过该估算方法可以依次求出下一时刻的所有特征向量。 矩阵符号说明 原始(真实)邻接矩阵 $A$ ,假设 $A$ 的秩为 $r$: $\lambda_{r+1}=\cdots=\lambda_n=0$ $$ A = \sum_{m=1}^n \lambda_m,x_m x_m^T=\begin{align*} \sum_{m=1}^r \lambda_m x_m x_m^T + \sum_{m=r+1}^n \lambda_m x_m x_m^T = \sum_{m=1}^r \lambda_m x_m x_m^T \end{align*}, $$ 滤波估计得到的矩阵及谱分解: $$ \widetilde A = \sum_{m=1}^r \widetilde\lambda_m,\widetilde x_m\widetilde x_m^T, \quad \widetilde\lambda_1\ge\cdots\ge\widetilde\lambda_n; $$ 只取前 $\kappa$ 项重构 : $$ A_\kappa ;=;\sum_{m=1}^\kappa \widetilde\lambda_m,\widetilde x_m\widetilde x_m^T, $$ 对 $A_\kappa$ 进行K-means聚类,得到 $A_{final}$ 目标是让 $A_{final}$ = $A$ 0/1矩阵 其中 $\widetilde{\lambda}_i$ 和 $\widetilde _i$ 分别为通过预测得到矩阵 $\widetilde A$ 的第 $i$ 个特征值和对应特征向量。 然而预测值和真实值之间存在误差,直接进行矩阵重构会使得重构误差较大。 对于这个问题,文献提出一种 0/1 矩阵近似恢复算法。 $$ a_{ij} = \begin{cases} 1, & \text{if}\ \lvert a_{ij} - 1 \rvert < 0.5 \\ 0, & \text{else} \end{cases} $$ 只要我们的估计值与真实值之间差距**小于 0.5**,就能保证阈值处理以后准确地恢复原边信息。 文中提出网络特征值扰动与邻接矩阵扰动具有相同的规律 真实矩阵 $A$ 与预测矩阵 $\widetilde{A} $ 之间的差为 (秩为 $r$) $$ A - \widetilde{A}=\sum_{m=1}^r \lambda_m\,x_m x_m^T-\sum_{m=1}^r \widetilde\lambda_m\,\widetilde x_m\widetilde x_m^T $$ **若假设特征向量扰动可忽略,即$\widetilde x_m\approx x_m$ ,扰动可简化为(这里可能有问题,特征向量的扰动也要计算)** $$ A - \widetilde{A} = \sum_{m=1}^r \Delta \lambda_m _m _m^T. $$ 对于任意元素 $(i, j)$ 上有 $$ |a_{ij} - \widetilde{a}_{ij}|=\left| \sum_{m=1}^r \Delta \lambda_m ( _m _m^T)_{ij} \right| < \frac{1}{2} $$ 于一个归一化的特征向量 $ _m$,非对角线上元素,其外积矩阵$ _m _m^T$ 满足 $$ |( _m _m^T)_{ij}| \leq \frac12. $$ 例: $$ x_m = \begin{bmatrix} \frac{1}{\sqrt{2}} \\ \frac{1}{\sqrt{2}} \end{bmatrix}\\ x_m x_m^T = \begin{bmatrix} \frac{1}{\sqrt{2}} \\ \frac{1}{\sqrt{2}} \end{bmatrix} \begin{bmatrix} \frac{1}{\sqrt{2}} & \frac{1}{\sqrt{2}} \end{bmatrix} = \begin{bmatrix} \frac{1}{2} & \frac{1}{2} \\ \frac{1}{2} & \frac{1}{2} \end{bmatrix} $$ 每个元素的绝对值$\frac12$ $$ \left| \sum_{m=1}^r \Delta \lambda_m (x_m x_m^T)_{ij} \right| \leq \sum_{m=1}^r |\Delta \lambda_m| \cdot |(x_m x_m^T)_{ij}| \leq \frac12\sum_{m=1}^r |\Delta \lambda_m|. $$ 为了确保 $|a_{ij} - \widetilde{a}_{ij}| < \frac{1}{2}$ 对所有 $(i,j)$ 成立,网络精准重构条件为: $$ \sum_{m=1}^r\left| \Delta \lambda_m\right| < 1 $$ 考虑特征向量的扰动: 1 将差分拆成"特征值项 + 特征向量项" 对称矩阵 $A,;\tilde A$ 的前 $r$ 个特征对分别记作 ${(\lambda_m,x_m)}{m=1}^r,; {(\tilde\lambda_m,\tilde x_m)}{m=1}^r$。 $$ \begin{aligned} A-\tilde A &=\sum_{m=1}^r\bigl(\lambda_m x_mx_m^\top-\tilde\lambda_m\tilde x_m\tilde x_m^\top\bigr)\\ &=\underbrace{\sum_{m=1}^r\Delta\lambda_m\,x_mx_m^\top}_{\text{特征值扰动}} \;+\; \underbrace{\sum_{m=1}^r \tilde\lambda_m\bigl(x_mx_m^\top-\tilde x_m\tilde x_m^\top\bigr)}_{\text{特征向量扰动}} . \end{aligned} $$ 2 如何控制"特征向量扰动项" 设 $\theta_m:=\angle(x_m,\tilde x_m)$, 则 rank-1 投影差满足 $$ \|x_mx_m^\top-\tilde x_m\tilde x_m^\top\|_2=\sin\theta_m, $$ 而单个元素绝对值永远不超过谱范数, 所以 $$ \bigl| (x_mx_m^\top-\tilde x_m\tilde x_m^\top)_{ij}\bigr| \;\le\;\sin\theta_m . $$ 要把 $\sin\theta_m$ 换成 只含特征值的量,用 Davis-Kahan sin θ 定理。 设 $$ \gamma_m:=\min_{k\neq m}\lvert\lambda_m-\lambda_k\rvert \quad(\text{与其它特征值的最小间隔}), $$ 当$\|\tilde A-A\|_2$ 足够小(或直接用 Weyl 定理把它替换成 $|\Delta\lambda_m|$)时 $$ \sin\theta_m \;\le\; \frac{\lvert\Delta\lambda_m\rvert}{\gamma_m} \quad\text{(单向版本的 Davis-Kahan)}\; $$ 3 元素级误差的统一上界 把两部分误差放在一起,对 非对角元 ($|x_{mi}x_{mj}|\le\tfrac12$ 的情形) 有 $$ \begin{aligned} \lvert a_{ij}-\tilde a_{ij}\rvert &\le \frac12\sum_{m=1}^r\lvert\Delta\lambda_m\rvert \;+\; \sum_{m=1}^r \lvert\tilde\lambda_m\rvert\, \sin\theta_m\\[4pt] &\le \frac12\sum_{m=1}^r\lvert\Delta\lambda_m\rvert \;+\; \sum_{m=1}^r \lvert\tilde\lambda_m\rvert\, \frac{\lvert\Delta\lambda_m\rvert}{\gamma_m}. \end{aligned} $$ 4 纯"特征值—谱隙"条件 若要保证 所有 非对角元素都 < $\tfrac12$,只需让 $$ \boxed{\; \sum_{m=1}^r \lvert\Delta\lambda_m\rvert \Bigl( \tfrac12+\frac{\lvert\tilde\lambda_m\rvert}{\gamma_m} \Bigr) \;
科研
zy123
1年前
0
15
0
2025-04-26
Mesa仿真
Mesa仿真 配置环境 requirements.txt mesa[rec] # 包含 networkx、matplotlib、ipywidgets、solara 等推荐依赖 jupyterlab numpy pandas Conda 命令行 # 1) 添加 conda-forge 通道并设为最高优先级 conda config --add channels conda-forge conda config --set channel_priority strict # 2) 创建并激活新环境(这里以 python 3.11 为例) conda create -n mesa-env python=3.11 -y conda activate mesa-env # 3a) 通过 pip 安装(使用上面的 requirements.txt) pip install -r requirements.txt # 或者 3b) 纯 Conda 安装等价包(推荐所有包都从 conda-forge) conda install \ mesa=3.1.5 networkx matplotlib ipywidgets solara \ numpy pandas jupyterlab \ -c conda-forge
科研
zy123
1年前
0
20
0
1
2
3
下一页